نورالینک دوباره خبرساز شد! اینبار یک بیمار مبتلا به ALS توانسته تنها با قدرت ذهنش بازوی رباتیکی را کنترل کند.

۳ مطلب

نورالینک دوباره خبرساز شد! اینبار یک بیمار مبتلا به ALS توانسته تنها با قدرت ذهنش بازوی رباتیکی را کنترل کند.

طراحی ربات دارای یک سیستم پیچیده از دو یا سه کابل است که بازو را فعال میکند و به آن امکان میدهد تا گرفتن اجسام را با زاویه مخروطی ۱۵ درجه تنظیم کند. این ویژگی به ربات اجازه میدهد تا اشیاء با قطر گسترده را کنترل کند و بارهایی را تا ۲۶۰ برابر وزن خود تحمل کند.
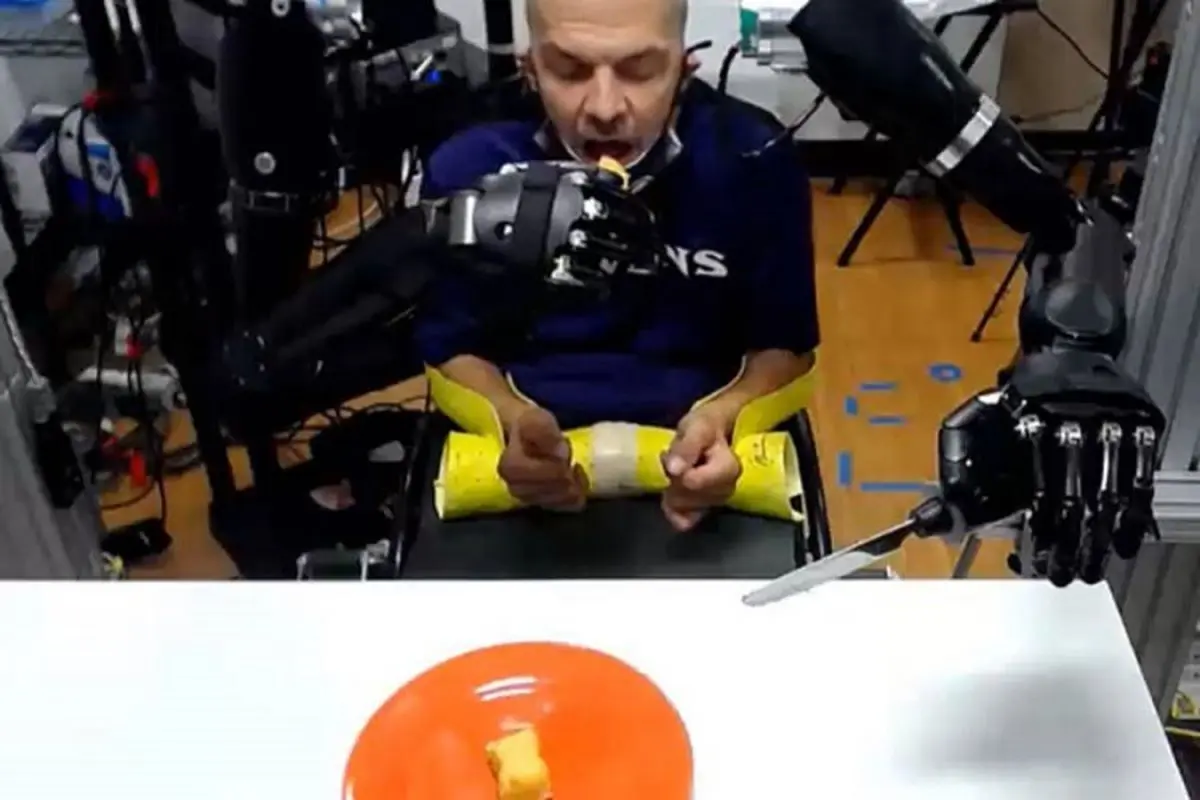
محققان آزمایشگاه فیزیک کاربردی جان هاپکینز به تازگی با طراحی یک بازوی رباتیک جدید، به یک مرد نیمه فلج کمک کرده اند تا بتواند خودش غذا بخورد.

